Некорректная работа программного обеспечения или почему Хэмилтон проиграл в Австралии

Сложность стратегии современных гонок в том, что не все могут разобраться в ней. Наш постоянный читатель Александр Быков на простой схеме объясняет ситуацию с пит-стопами у лидеров на Гран При Австралии, прошедшими в режиме виртуальной машины безопасности.
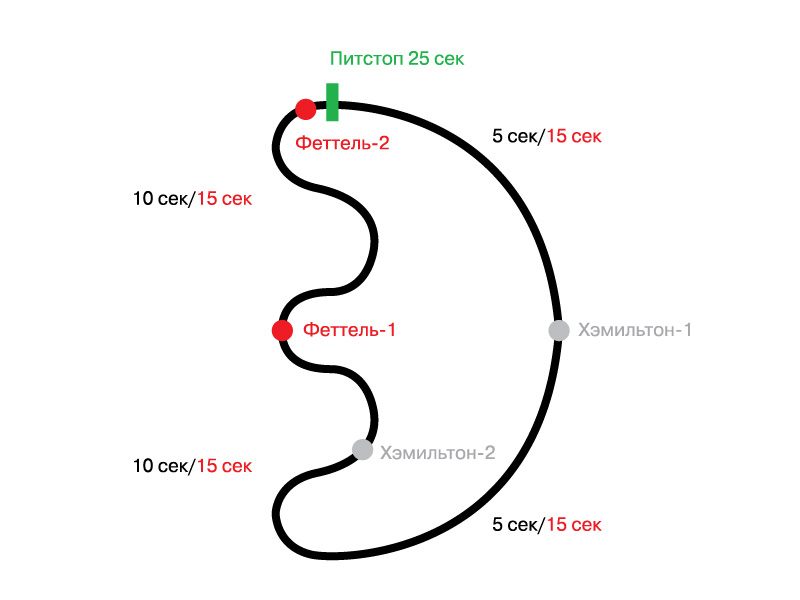
Итак, для начала представим, из чего состоит трасса. Из быстрой и медленной частей, разбитых на четыре сектора – два быстрых и два медленных. Условно будем считать, что эти сектора равны по длине, но скорость на них в гоночных условиях отличается в два раза. То есть каждый быстрый сектор проходится в гонке за 5 секунд, а каждый медленный – за 10. Таким образом, на весь круг уходит 30 секунд.
В режиме виртуальной машины безопасности все сектора проходятся с фиксированной скоростью за 15 секунд. И на круг тратится уже минута.
Представим, что в момент активации VSC гонщики находятся в позициях «Феттель-1» и «Хэмилтон-1». Между ними разрыв в 15 секунд (5+10 по секторам). Пит-стоп (точка выезда отмечена зелёным) занимает 25 секунд.
Стратеги из Mercedes спокойны, ведь Хэмилтон контролирует гонку. Но в режиме виртуальной машины безопасности все тормозят, и Феттелю до пит-лейна ехать 15 секунд плюс 25 секунд на пит-стоп, а значит, он вернётся на трассу через 40 секунд. Хэмилтону же надо проехать три раза по 15, то есть 45 секунд. Так и появился проигрыш в 5 секунд…
Но ведь в Mercedes есть сложное программное обеспечение, как же стратеги споткнулись на ровном месте? Возможно, все дело было в неправильном позиционировании пилотов.

Давайте представим, что режим VSC был введён на 10 секунд позже. Феттель за это время в гоночных условиях успел доехать ровно до въезда на пит-лейн (точка «Феттель-2») и благодаря отменной реакции сразу же на него нырнул для смены шин. Хэмилтон за те же 10 секунд в гоночном режиме успел закончить быстрый сектор и проехал половину первого из двух медленных (точка «Хэмилтон-2»). Теперь ему осталось преодолеть только 1,5 медленных сектора, то есть 22,5 секунды в режиме виртуального сейфти-кара. А Феттелю на пит-стоп нужно 25. В таком случае победа осталась бы за британцем!
В реальности трасса существенно сложнее этой упрощённой петли. Быстрые и медленные сектора чередуются, а средняя скорость непостоянна. Расчёт сильно зависит от правильности позиционирования машин.
Ошибки, конечно, случаются у всех, и в современном мире мы постоянно сталкиваемся с некорректной работой того или иного программного обеспечения. Но особенно обидно, когда эти ошибки повторяются. А ведь это как раз тот самый случай.

Вспомним Монако-2015, ситуация там была на удивление похожа. Льюис был быстрейшим весь уик-энд. Он выиграл поул, выиграл старт и был быстр в гонке. Но вдруг случается режим виртуальной машины безопасности. В Mercedes отправляют Хэмилтона на «беспроблемный» пит-стоп, но в итоге британец пропускает вперёд не только Росберга, но и Феттеля. На подиуме Нико честно признаётся, что был медленнее и победил только благодаря стечению обстоятельств, а Тото Вольф говорит, что в команде ошиблись в расчетах: «Мы думали, что у Льюиса достаточное преимущество во времени, чтобы сменить шины и вернуться на трассу впереди Нико. Однако расчеты оказались ошибочными, и Льюис вернулся на трассу третьим. Это была наша ошибка».
Не раз уже было сказано, что современные команды слишком полагаются на расчёты и всё меньше используют здравый смысл. Но ведь и мы с нашей зависимостью от смартфонов не сильно от них отличаемся. В 80-е годы ломалась механика, в наше время глючит софт.